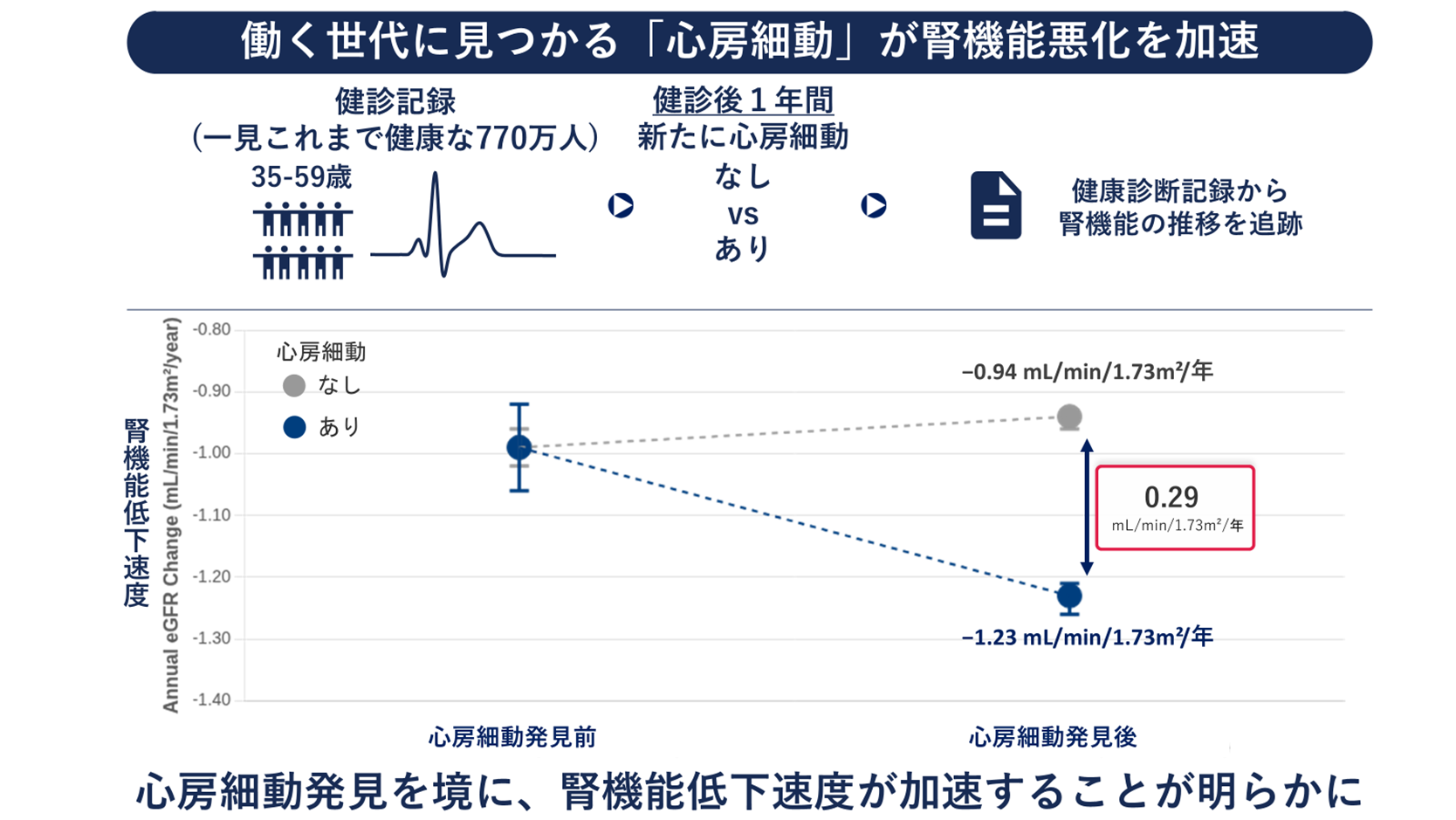
働く世代で見つかる「心房細動」は腎機能低下のサイン ―心臓と腎臓の「悪循環」を防ぐため、早期発見が重要
【概要】広島大学大学院医系科学研究科 福間真悟 教授(兼:京都大学大学院医学研究科 特定教授)、京都大学大学院医学研究科 森雄一郎 博士課程学生(現:同大 特定研究員)、宮崎大学 池之上辰義 教授、京都大学大学院医学研究科 柳田素子 教授らの研究チームは、全国健康保険協会(協会けんぽ)に加入する就労世代の健康診断および医療データを分析し、不整脈の一つである「心房細動(しんぼうさいどう)」が新たに見つかると、その後の腎機能が年齢に伴う自然な低下と比べて加速することを明らかにしました。
これまで心臓に病気のなかった35〜59歳の約770万人のデータから、新たに心房細動が見つかった約2.3万人を追跡調査しました(追跡期間中央値:4.7年)。その結果、心房細動のない人と比べて、年間の腎機能低下スピードが速いことが分かりました。近年、心臓病・腎臓病・代謝疾患が互いに悪影響を及ぼし合う「心血管・腎・代謝症候群」という概念が注目されています。本研究は、働く世代における心房細動が、心臓のみならず腎臓へのダメージを引き起こし、この悪循環を加速させる引き金になりうることを国内最大規模のデータで初めて示したものです。
研究チームは、「健診で見つかった不整脈を単なる1個の異常所見と考えるのではなく、全身の健康を見直すきっかけにすることが重要」とコメントしています。
本成果は、国際学術誌『JAMA Network Open』に2026年米国時間5月14日付(日本時間5月15日)で掲載されました。
働く世代で見つかる「心房細動」が腎機能低下のサインに―心臓と腎臓の「悪循環」を防ぐ早期発見の重要性―
広島大学、宮崎大学、京都大学の研究チームは、国内最大規模の医療保険データを用いた調査により、働く世代(35~59歳)で新たに見つかる「心房細動」が、その後の腎機能低下スピードの上昇と関連していることを明らかにしました。
この成果は、2026年5月14日付で米国医師会の国際学術誌 JAMA Network Open に掲載されました。
1.背景心房細動は健康診断で偶然見つかることも多い不整脈であり、脳梗塞や心不全の重大な原因となります。研究チームは先行研究において、働く世代で見つかった心房細動が、将来の脳梗塞リスクが5倍、心不全リスクが18倍高まる徴候であることを報告しました(2025年、米国心臓協会誌『Circulation』掲載)。
近年、医療の現場では、心臓病、腎臓病、そして肥満や糖尿病などの代謝疾患が互いに悪影響を及ぼし合い、全身の臓器障害を進行させる「CKM(心血管・腎・代謝)症候群」という考え方が重要視されています。しかし働く世代において、新しく見つかった心房細動が心臓そのものだけでなく「腎臓」にどのような悪影響を及ぼすのかは、これまで大規模なデータで検証されていませんでした。
2.研究手法・成果研究チームは、全国健康保険協会(協会けんぽ)のデータ(2015〜2023年)を用い、過去に心血管疾患や末期腎不全のない35〜59歳の男女約770万人の健診記録を分析しました。そのうち、新たに心房細動が見つかった23,510人と、年齢や性別などの条件を揃えた心房細動のない117,550人を比較し、その後の腎機能(eGFR:推算糸球体濾過量)の変化を比較しました。
腎機能の低下スピードが加速: 心房細動が見つかった人は、見つからなかった人と比べて、年間の腎機能低下量(eGFRの低下)が有意に大きいことが確認されました(-1.23 vs. -0.94 mL/min/1.73m²/年)。心房細動が見つかる前の低下スピードには両群で差がなかったことから、心房細動の発症が腎機能低下の引き金になったと考えられます。
大幅な腎機能低下リスクが3倍: 腎機能が基準時から30%以上低下する重大イベントの発生リスクは、心房細動が見つかった人で約3倍(ハザード比2.91)に達しました
正常な脈(洞調律)に戻った人では低下が緩やかに: 心房細動が初めて確認された後、1年後の健診等で正常な脈(洞調律)に戻っていた人は、心房細動が続いていた人と比べて、腎機能の低下スピードが有意に緩やかでした。
3.波及効果【研究の意義】
本研究により、働く世代における心房細動が「心臓」だけでなく「腎臓」の機能低下を加速させるリスク因子であることが明らかになりました。これは、心房細動がCKM(心血管・腎・代謝)症候群の進行を早めるシグナルであることを示唆しており、若い世代における心房細動への早期介入の効果検証研究を心臓のみならず全身を俯瞰するテーマで推進する重要性を指示する結果であり、また心房細動のみならず心臓に生じる軽微な異常をCKM(心血管・腎・代謝)症候群の初期症状として認識する重要性を示唆しています。
【社会へのメッセージ】
心房細動が見つかったとしても、すぐに薬の服用や手術が必要かどうかは、人によって様々です。それであっても、健康診断で「心房細動」を指摘された場合、医療機関を受診することが重要です。直接不整脈を治すための薬や手術だけでなく、血圧や血糖のコントロールなど生活習慣の見直しが、将来の心臓の健康や慢性腎臓病の予防につながります。
4.研究プロジェクトについて本研究は、協会けんぽの「外部有識者を活用した委託研究事業」で採択された、
福間真悟 教授の研究班「保健事業による健康アウトカムを改善するための行動インサイト:因果探索の応用」の一環として実施しました(助成番号:23JHIA04)。
<用語解説>『心房細動』:心臓の上部にある「心房」という部屋が、けいれんするように不規則に細かく震える不整脈の一種です。自覚症状がない場合も多いですが、心臓の中に血の塊(血栓)ができやすくなるため脳梗塞の主な原因となるほか、心臓のポンプ機能が低下して心不全を引き起こすこともあります。
『心不全』:心臓のポンプ機能が低下する病気です。進行すると、息切れやむくみ、だるさといった症状が現れ、生命に関わることもあります。
『腎機能・慢性腎臓病』: 腎臓は血液中の老廃物をろ過し、尿として体外へ排出する重要な働きを担っています。本研究で用いたeGFR(推算糸球体濾過量)は、この腎臓の働き(腎機能)を評価する指標です。この腎機能が慢性的に悪化した状態を「慢性腎臓病」と呼びます。進行して人工透析などの腎代替療法がいよいよ避けられなくなるまで無症状で気づかないことも多く注意が必要で、また心血管疾患(心不全など)のリスクも高めることが知られています。
『全国健康保険協会(協会けんぽ)』: 日本の公的医療保険を運営する「保険者」の一つで、主に中小企業の従業員とその家族が加入しています。加入者数が約4,000万人にのぼる日本最大の保険者です。
<研究者のコメント>働く世代に生じた心房細動は、単に心臓に限った問題ではなく、腎臓といった一見離れた臓器にも今後障害が生じてくる重要なシグナルになりうることが分かりました。
今後は、こういった働く世代で心房細動に早期に介入することが腎臓にも良い影響があるのか、また他のこれまであまり問題ないと言われてきた他の軽い心電図異常についてもCKM(心血管・腎・代謝)症候群の観点で重要なシグナルになり得るのか、明らかにしていきたいと考えています
<論文タイトルと著者>
タイトル: New-Onset Atrial Fibrillation and Accelerated Kidney Function Decline in Working-Age Adults
著者:Yuichiro Mori(森雄一郞), Keita Hirano(比良野 圭太), Tatsuyoshi Ikenoue(池之上 辰義), Arisa Kobayashi(小林亜里沙), Motoko Yanagita(柳田素子), Shingo Fukuma(福間真悟*)*責任著者
掲載誌: JAMA Network Open
掲載日:2026年5月14日付(米国時間)(オンライン)
DOI: 10.1001/jamanetworkopen.2026.12823
報道発表資料(409.77 KB)
論文掲載ページ (New-Onset Atrial Fibrillation and Accelerated Kidney Function Decline in Working-Age Adultsに移動します)
広島大学研究者ガイドブック (福間真悟 教授)
【お問い合わせ先】
<研究に関すること>
福間 真悟(ふくま しんご)
広島大学大学院医系科学研究科 教授(兼:京都大学大学院医学研究科 特定教授)
TEL:082-257-5162
E-mail:shingo-fukuma*hiroshima-u.ac.jp , fukuma.shingo.3m*kyoto-u.ac.jp
<協会けんぽ『外部有識者を活用した委託研究事業』に関すること>
全国健康保険協会 企画部 調査分析・研究グループ
担当:馬場 武彦
TEL:03-6680-8476(直通) FAX:03-3355-0600
E-mail:99kenkyu.86t*kyoukaikenpo.or.jp
<報道に関すること>
広島大学 広報室
TEL:082-424-4383 FAX:082-424-6040
E-mail:koho*office.hiroshima-u.ac.jp
京都大学 広報室 国際広報班
TEL:075-753-5729 FAX:075-753-2094
E-mail:comms*mail2.adm.kyoto-u.ac.jp
(*は半角@に置き換えてください)