
機構の工夫によるロボットの付加価値の向上
研究テーマ
- 機能的な形状の創造
- 動力伝達機構
- ロボティクス
目標・狙い
リアルワールドに対する迅速かつ柔軟な行動を実現する基盤ロボティクス技術として、構造に知能を内包したロボットメカニズムの研究などを行っており、人間とは異なる形でのマニピュレーション技術の実現を目指します。
<研究概要説明動画>
研究事例
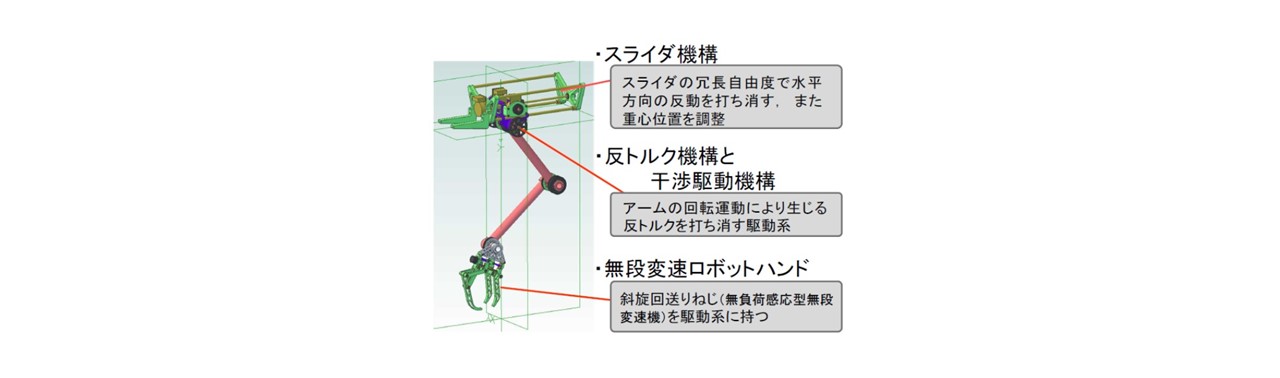
ドローンのための無反動ロボットアーム
【概要】
【本研究の優位性】

【想定される市場・製品・産業分野】
【特許】
特願2016-136605 多関節ロボットアーム及びUAV
【論文】
Ohnishi, T. Takaki, T. Aoyama and I. Ishiii, Development of a 4-Joint 3-DOF robotic arm with anti-reaction force mechanism for a multicopter, in Proc. IEEE/RSJ Int. Conf.Intelligent Robots and Systems, pp. 985-991, 2017.
その他の研究事例
階段を移動できる遊星車輪機構を用いた倒立振子ロボット
https://www.robotics.hiroshima-u.ac.jp/researches_single_jp/937/
モアレ縞を利用した微小歪可視化シール
https://www.robotics.hiroshima-u.ac.jp/researches_single_jp/936/
など
研究者からのメッセージ
種々のニーズに合わせて、私とは異なる技術を持っている企業の方と共同で、中長期的な開発ができることを期待しております。
研究者
高木 健(takaki takeshi)
広島大学
大学院先進理工系科学研究科
教授