
製造効率向上を実現するデータ駆動型制御システム
Database-Driven Kansei Feedback Control System for Improvement of Manufacturing Efficiency
研究テーマ
- データベースを核とした新しい制御アルゴリズムを導入し、生産現場における製造効率の向上を目指す。
目標・狙い
超情報化社会に合わせた新しい制御アルゴリズムを導入することで、以下を実現する。
(1)機械立ち上げ時間の短縮
(2)原材料破棄率の削減
(3)人に依存しない製造システム構築
想定される市場・製品・産業分野
- 製造業一般(特に食品・自動車製造)
- 農業・畜産業
- 建設業
概要
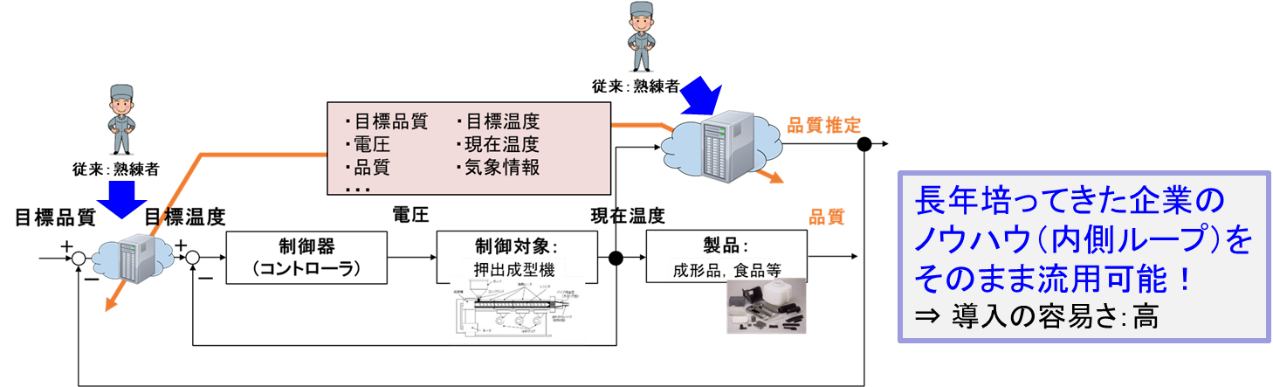
- センサー技術が発達した現代では、温度、湿度等の気象情報や、稼働している機械の電流、電圧等の運転情報、原料投入量や歩留まり等膨大なデータが瞬時に収集可能。
- 本研究では、膨大なデータが収集可能な超情報化社会に適した新しい制御方法を開発する。
- 新制御方法は、データベースを基盤とし、機器のデータのみならず、熟練者の制御パラメータ変更履歴を格納するため、熟練技術の再現をすることが可能である。
- 導入後は、コンピュータで学習することにより、熟練技術を超える制御を実現することが可能となる。
本研究の優位性
- 学習機能を搭載し、機器を使用すればするほど「賢くなる」制御法
- 各企業が保有している既存の制御システムに容易に付加できる
特許 (権利化2件,出願6件)
- 山本,木下: データ指向型フィードバック制御装置およびデータ指向型フィードバック制御方法,特願2016-164631,出願日2016年8月30日,特開2018-036773,公開日2018年3月1日,出願者 国立大学法人広島大学
- Yamamoto T and Kinoshita T, Data-Oriented Feedback Controller and Data-Oriented Feedback Control Method, US15/690261, 登録年月日2020年3月3日,登録番号10,575,769,出願日2017年8月29日, US-2018-0055403,公開日2018年3月1日,出願者 国立大学法人広島大学(上記特許の米国出願)
論文
- 木下拓矢,山本透: データ指向型カスケード制御系の一設計,電気学会電子・情報・システム部門誌,第136巻,第5号: 703-709,2016
- Kinoshita T and Yamamoto T: Design of a Data-Oriented Kansei Feedback Control System, Journal of Robotics, Networking and Artificial Life, Vol. 4, No. 1: 14-17, 2017.
- 山内 優,木下 拓矢,脇谷 伸,山本 透,宮腰 穂,原田 真悟,矢野 康英: データベース駆動型制御アプローチに基づく車両ドライバモデルの構築,電気学会電子・情報・システム部門誌,第138巻, 第7号: 910-911, 2018.
- 今地 大武,木下 拓矢,山本 透,伊藤 啓介,吉田 昌弘,中川 正: ランダムフォレストによる変数選択に基づくデータベース駆動型モデリングとその線形空燃比センサ出力予測への応用,電気学会電子・情報・システム部門誌,第139巻,第8号: 850-857, 2019.
- 木下 拓矢,山本 透: 類似度に基づくデータベース駆動型制御系の一設計,電気学会電子・情報・システム部門誌,第140巻,第3号: 1-8, 2020.
- Kinoshita T, Ikeda H, Yamamoto T, Machizawa M, Tanaka K, and Yamazaki Y: Design of a Database-Driven Kansei Feedback Control System using a Hydraulic Excavators Simulator, Journal of Robotics and Mechatronics, Vol. 32, No. 3, 2020. to appear.
外部資金の獲得状況
- 日本学術振興会 特別研究員奨励費(PD):精神価値を向上させる人の感性を考慮したパフォーマンス駆動型制御系の一設計(課題番号17J03657) 130万円
研究代表者 2017年度 - 日本学術振興会 研究活動スタート支援:「感性を制御する」データベース駆動型感性フィードバック制御システムの構築(課題番号18H05907) 230万円
研究代表者 2018年度~2019年度 - その他:研究分担者6件(共同研究費)
受賞状況
- IEEJ (Institute of Electrical Engineers of Japan),Outstanding Student Presentation Award, Aug. 27, 2015.
- 電気学会,電子・情報・システム部門技術委員会奨励賞,平成28年3月4日
- The 2017 International Conference on Artificial Life and Robotics (ICAROB 2017), Young Author Award, Jan. 21, 2017
- 電気学会, 優秀論文発表賞,平成29年9月7日
- システム制御情報学会,奨励賞,平成30年5月17日
- 電気学会,研究会奨励賞,平成30年9月6日
研究者
木下 拓矢 (KINOSHITA TAKUYA)
広島大学
大学院先進理工系科学研究科
准教授