目標・狙い
リアルワールドに対する迅速かつ柔軟な行動を実現する基盤ロボティクス技術として、構造に知能を内包したロボットメカニズムの研究などを行っており、人間とは異なる形でのマニピュレーション技術の実現を目指します。
<研究概要説明動画>
研究事例
- ●ドローンのための無反動ロボットアーム
- 【概要】
- ・ドローンなどの小型無人航空機にロボットアームを取付け空中から作業できるとその活躍範囲が拡がります。しかし、アームを取付けるとアームの動作によってドローンの姿勢が崩れてしまいます。
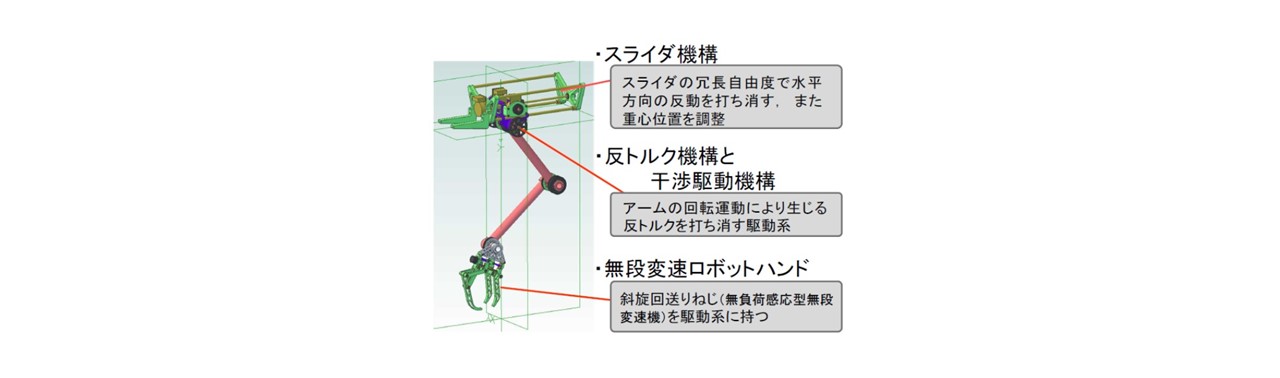
- ・この問題解決のため、作業を行う「無段変速ロボットハンド」に加えて、アーム回転の反動を打ち消す「反トルク機構」と「干渉駆動機構」、水平方向の反動を打ち消し重心位置を調整する「スライダ機構」を考案して、ドローンの姿勢に影響を与えない無反動ロボットアームを開発いたしました。
-
- 【本研究の優位性】
- ・ロボットアームの動作による飛行への外乱をなくすため、ドローン本体の飛行制御システムの改造や専用の新たなコントローラの追設が不要で、どんなドローンにもロボットアームを簡単に追設可能です。
- ・アームを脚として、鳥が木の枝に留まるように、枝などに留まることが可能です。

-
- 【想定される市場・製品・産業分野】
- ・レスキュー(避難用の縄梯子の架設、水難事故での浮き輪の投入、等)
- ・サンプルの回収(広大な農場で作物サンプルの回収、等)
- ・計測や監視(高所の枝等からの長時間の計測や監視、等)
- ・荷物の宅配(高層階の住宅へ直接アクセス)
-
- 【特許】
- ・特願2016-136605 多関節ロボットアーム及びUAV
-
- 【論文】
- ・Ohnishi, T. Takaki, T. Aoyama and I. Ishiii, Development of a 4-Joint 3-DOF robotic arm with anti-reaction force mechanism for a multicopter, in Proc. IEEE/RSJ Int. Conf.Intelligent Robots and Systems, pp. 985-991, 2017.
その他の研究事例
- ・階段を移動できる遊星車輪機構を用いた倒立振子ロボット
- ・モアレ縞を利用した微小歪可視化シール
研究者からのメッセージ
種々のニーズに合わせて、私とは異なる技術を持っている企業の方と共同で、中長期的な開発ができることを期待しております。
上述の内容に関心のある方は、以下の窓口にお問い合わせください。


