概要
- ●産業用ロボット,自動機械,モータシステムら機械システムにおける周期(繰り返し・正常)情報と非周期(突発・異常)情報を利用し,機械システムの高精度化とヒトとの協働を実現する。
【研究者によるシーズ紹介動画】
解決する課題
- ●従来の機械システムは高精度化と引き換えに,ヒトと協働する柔軟さに欠けていた
- ●産業機械の周期的な繰り返し動作は多数の高調波を含む周期外乱を誘発し,その精度に悪影響を与える
- ●異常製品の検出にはヒトによる手触り検査が必要であった
課題への貢献
- ●精密周期運動と柔軟非周期運動を両立する機械システムの運動制御を実現した
- ●周期的に動作する産業機械の外乱を推定・補償することで,高精度な周期運動制御を実現した
- ●非周期的な異常製品を検出するロボットを用いた自動手触り検査を実現した
想定される市場・製品・産業分野
- ●モータを利用した製造システムの計測と制御
- ●モーションコントローラ
- ●ロボットを利用した異常検知
方法
<技術の説明>
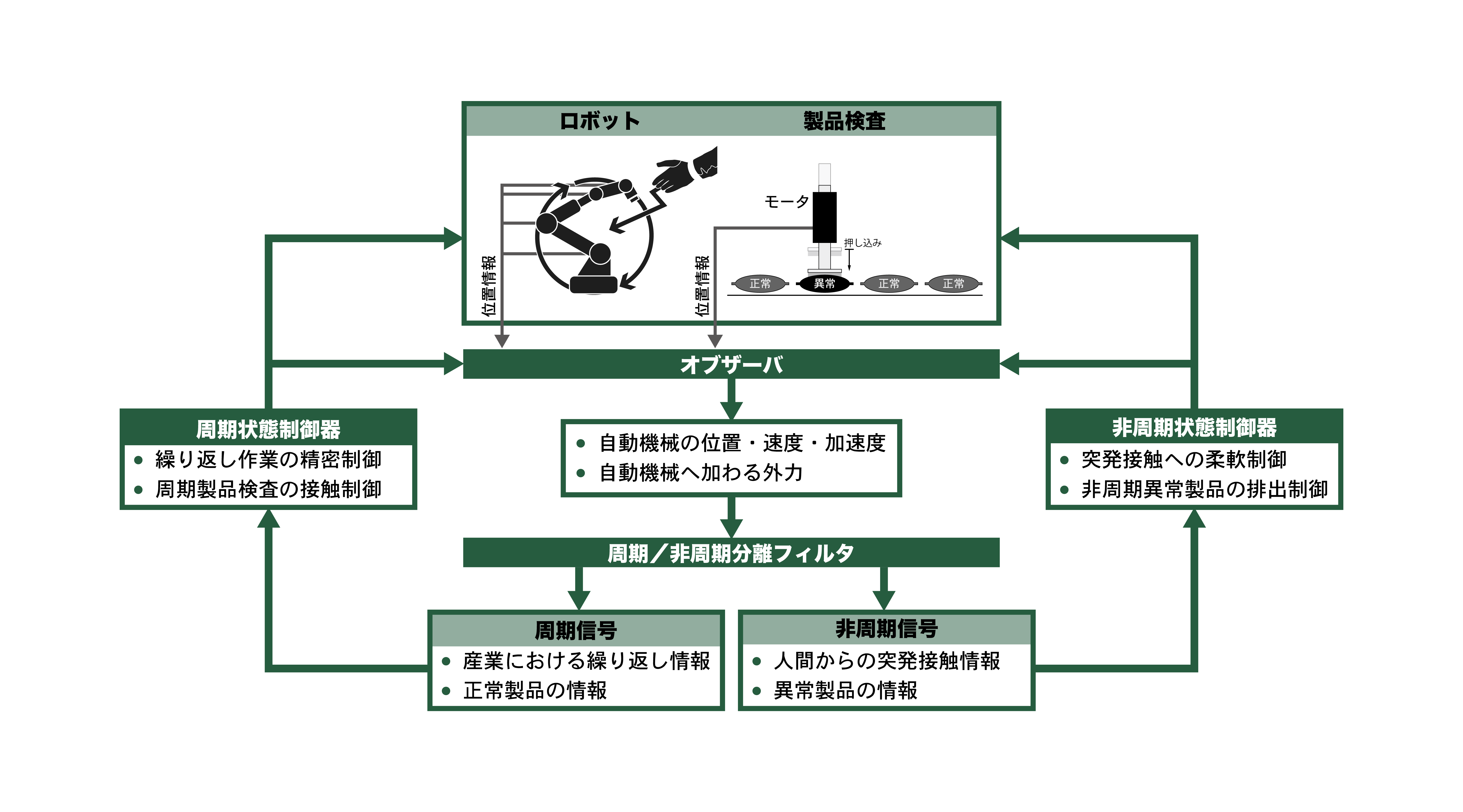
- ●オブザーバによる機械システムの内部状態推定
- ―機械システムの位置・速度・加速度・力を推定
- ―ヒトによる接触力・製品の状態を推定
- ●周期/非周期分離フィルタによる周期信号と非周期信号の分離
- ―周期信号:繰り返し運転する機械システムへの外乱,製品の正常反力,など
- ―非周期信号:突発的な外力,製品の異常反力,など
- ●周期状態と非周期状態の制御
- ―周期信号を用いた繰り返し動作の精密制御
- ―非周期信号を用いた突発接触への柔軟制御や異常製品の検出
本研究の優位性
- ●世界唯一の周期/非周期情報活用技術
- ●既存の機械に対して付加的なアルゴリズムによる実装
- ●リアルタイムの情報収集・情報処理・制御が実装可能
応用例1:多軸マピュレータの周期精密/非周期柔軟制御
-
- ●周期運動と非周期運動を利用することで精密かつ柔軟なロボット動作を実現した
- ●周期外乱情報を利用した繰り返し動作の超高精度化を実現した
応用例2:食品包装の周期正常/非周期異常情報計測
- ●ロボットを用いた能動センシングにより,非周期異常な包装トラブルを高精度検出した
論文
- ●Hisayoshi Muramatsu and Seiichiro Katsura, “Periodic/Aperiodic Motion Control Using Periodic/Aperiodic Separation Filter,” IEEE Transactions on Industrial Electronics, vol. 67, no. 9, pp. 7649-7658, Sep. 2020.
- ●Hisayoshi Muramatsu and Seiichiro Katsura, “An Enhanced Periodic-Disturbance Observer for Improving Aperiodic-Disturbance Suppression Performance,” IEEJ Journal of Industry Applications, vol. 8, no. 2, pp. 177-184, May 2019.
- ●Hisayoshi Muramatsu and Seiichiro Katsura, “Separated Periodic/Aperiodic State Feedback Control Using Periodic/Aperiodic Separation Filter Based on Lifting,” Automatica, vol. 101, pp. 458-466, Mar. 2019.
- ●Hisayoshi Muramatsu and Seiichiro Katsura, “An Adaptive Periodic-Disturbance Observer for Periodic-Disturbance Suppression,” IEEE Transactions on Industrial Informatics, vol. 14, no. 10, pp. 4446-4456, Oct. 2018.
外部資金
- ●JST ACT-X 数理・情報のフロンティア,“ 周期/非周期分離制御の開拓, ” 2020 年度~2022 年度, 代表
研究者からのメッセージ
上述の内容に関心のある方は、以下の窓口にお問い合わせください。


