- EN
- JP

同志社大学大学院生命医科学研究科の手嶋優風大学院生、飛龍志津子教授、理工学部の土屋隆生教授らは、広島大学と共同で、コウモリが音であるエコーから把握する障害物空間が実空間とは異なり、飛行に重要な場所を効率よく把握していることを発見しました。
コウモリは洗練された超音波ソナー注1)の能力を有しています。これまで、コウモリの飛行や放射される超音波音声(以後、パルス)の分析から、そのソナー能力の高さが明らかになってきました。しかしコウモリが聴取しているエコーを計測することが困難なために、コウモリがエコーロケーションによってどのような空間を把握しているのかについて、これまで明らかにされていませんでした。
本研究グループは、障害物空間を飛行するコウモリの飛行軌跡や放射パルスを計測し、音響シミュレーション空間と融合することで、エコーの復元を試みました。さらに復元したエコーから、パルスが反射した場所(エコー源)を算出し、可視化しました。その結果、すべてのエコー源で構成される「エコー空間」は、実際の空間とは異なり、飛行に重要な場所のみで構築されていることを発見しました。
本研究成果は、3月14日午前1時(英国夏時間)〔日本時間3月14日午前9時〕に「BMC Biology」で公開されました。
本成果は、以下の事業・研究領域・研究課題によって得られました。
日本学術振興会科学研究費助成事業「学術変革領域研究(A)」
領域課題名:「サイバー・フィジカル空間を融合した階層的生物ナビゲーション」
(研究統括:橋本浩一 東北大学 教授)
研究課題名:「音響サイバー空間を利用したコウモリの階層ナビゲーションの理解」
研究代表者:飛龍志津子 同志社大学生命医科学部 教授
研究期間:令和3年度~令和7年度
日本学術振興会科学研究費助成事業 基盤研究A
研究課題名:コウモリの集団飛行に学ぶ、3次元群知能センシングの解明とその工学的応用
研究代表者:飛龍志津子 同志社大学生命医科学部 教授
研究期間:平成30年4月~令和4年3月
【背景】
コウモリは、自ら発した超音波音声(パルス)に対する反響音(エコー)を聴取・分析することで、周囲環境を把握し飛行します。コウモリの音による空間把握能力は、暗闇の中、障害物にぶつかることなく微小昆虫を高速かつ連続で捕食できるほど、高度に発達しています。一方で、コウモリがエコーから把握する空間は、滑らかで大きな壁にぶつかる行動が観察されるなど、視覚での認識空間とは異なることが予想される行動が観察されています。つまりコウモリは、エコーからの情報をもとに、我々が視覚で見ている実際の空間とは異なる独自の認識空間を構築している可能性が考えられます。しかし、コウモリの把握している空間を推定するためには、コウモリの左右の耳に届く周囲からのエコーをすべて取得する必要がありますが、技術的な問題から、エコーの計測は困難でした。
【内容】
上記の問題を解決するために、本研究では、障害物を配置した実空間での行動計測と音響シミュレーションを組み合わせることによって、エコーの復元を可能としました。そして、コウモリが放射したパルスが反射した場所(エコー源)を算出することで、すべてのエコー源から構成される空間(「エコー空間」)を可視化し、コウモリがエコーから把握する障害物空間の検討を行いました。
障害物として3枚のアクリル板を設置した空間内を用意し、コウモリを飛行させたところ、コウモリは板を避けるようにS字の経路で飛行しました(図1上図)。この際のエコー空間を可視化したところ、障害物を回避するために重要な場所、板状の障害物のエッジ部分から主に構成されていることが明らかとなりました(図1)。またコウモリが障害物空間を初めて飛行した際と、空間を十分に学習した飛行12回目では、エコー源がよりエッジ部分に集まっており、少ないパルス放射で効率的に回避行動に重要となる障害物のエッジ付近の情報を取得していることもわかりました(図2)。さらに、エコー源の方向がコウモリの飛行方向の制御(旋回角速度)に影響を与えている可能性を示すことができました(図3)。
【今後の展開】
本研究において、飛行中にコウモリに届くエコーが復元可能となりました。これにより、コウモリへの入力情報となる「エコー」と、コウモリからの行動出力である「飛行・パルス」の双方が取得でき、コウモリをシステムととらえた場合の入出力情報の関係より、その行動ルールの解明が期待できます。1送信器(口または鼻)2受信器(両耳)という極めてシンプルな機構で空間を把握するコウモリのソナー機構をモデル化することで、生物由来の新たなセンシング手法の確立やその工学的応用が期待できます。
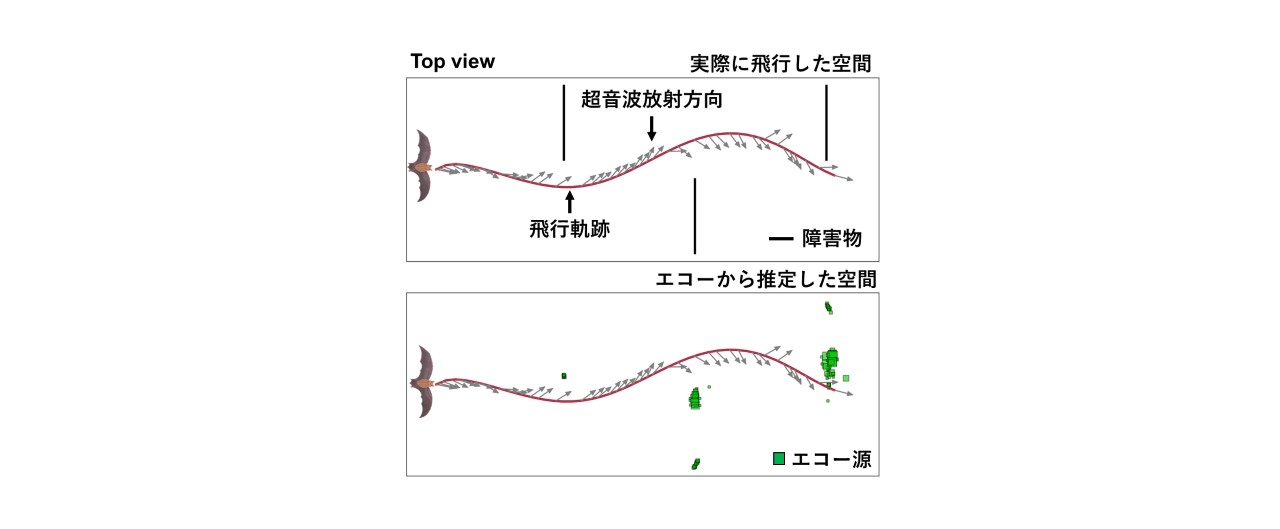
図1 コウモリが実際に飛行した空間と、エコーから推定した空間の比較。それぞれ実験空間を上から見た図になっている。実際の空間には、コウモリがS字に飛行するように、左右交互に障害物であるアクリル板が配置されている。対してエコーから推定した空間では、アクリル板のエッジ付近のエコー源で主に構成されている。エコー源の大きさはエコーの音圧に比例している。
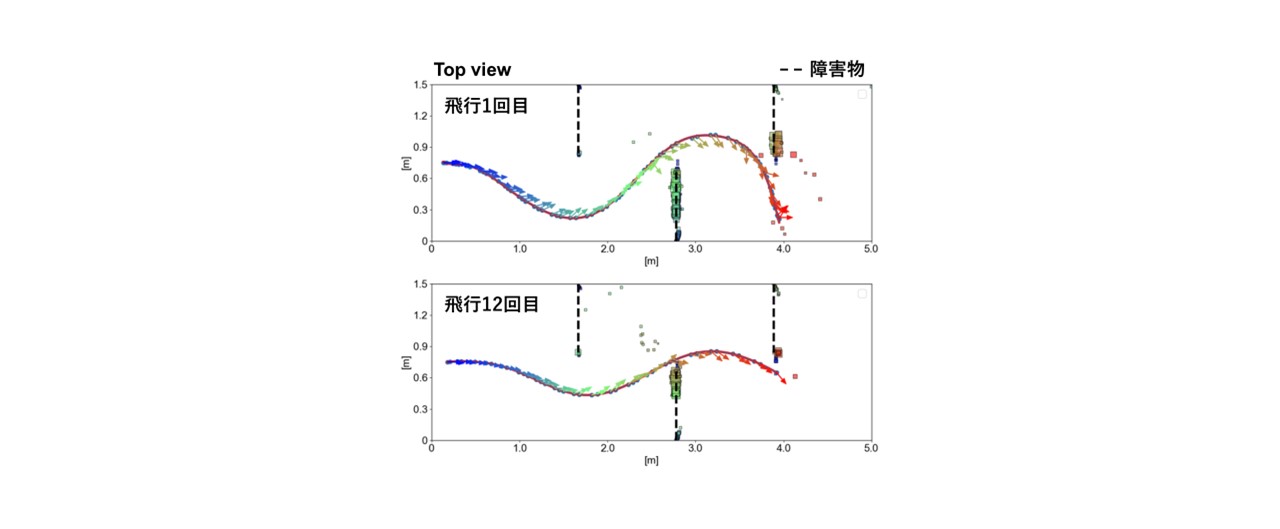
図2 障害物空間を最初に飛行した際と、複数回飛行し空間を学習した後の飛行した際のエコー源と障害物の内側のエッジ間の距離の比較。コウモリは空間を学習すると、エコー源が障害物の内側のエッジにより集中するようになる。エコー源の大きさはエコーの音圧に比例している。
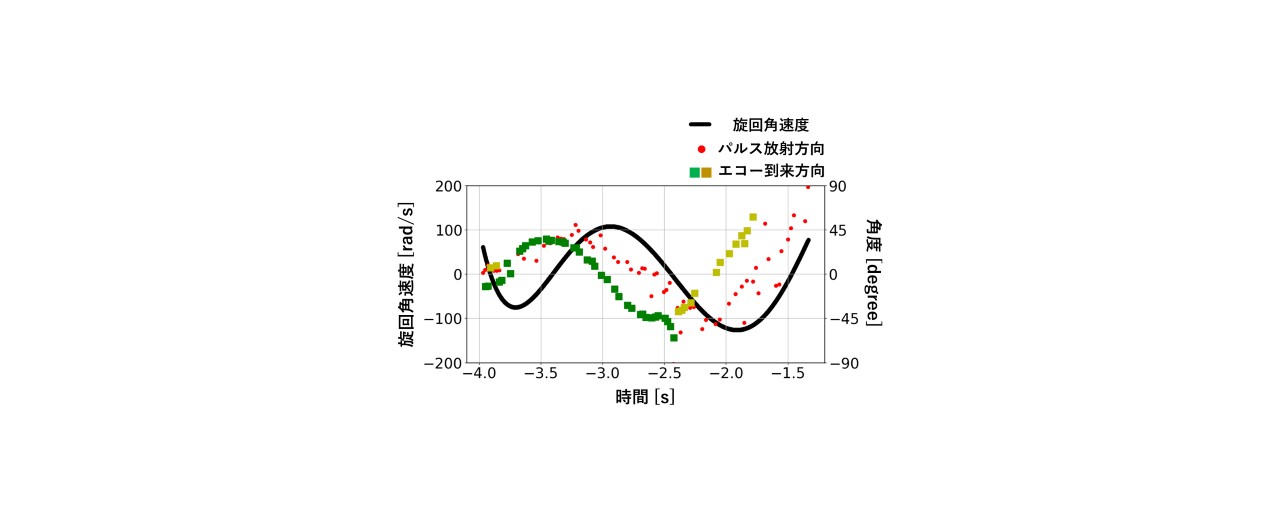
図3 コウモリが障害物空間を飛行した際の、飛行の旋回角速度とパルス放射方向、エコー到来方向の時間変化。パルス放射方向が旋回角速度に先行して変化していることは知られていたが、今回初めて、エコー到来方向が旋回角度速度に時間的に先行して、変化していることを明らかにした。(エコー到来方向のプロットは、エコー源が定位した障害物ごとに色を分けている。)
注1)ソナー
音によって物体を探知また測距する技術。SONAR(SOund NAvigation and Ranging)の頭字語。
